The provision of online vehicular applications and services in the context of intelligent transportation systems (ITSs) requires high computation capabilities and low-latency communication. Edge computing is a promising platform for addressing these requirements because of several features, including geo-distribution, mobility and location awareness, low latency, heterogeneity, and support for real-time interactions. The characteristic of proximity enables the edge provides a fast response for the computation of various types of applications and services in the context of connected vehicles. These are currently seen as essentially the computing devices of the next decade, just as smartphones have been for the last decade.
Network edges can be deployed along the road at fixed ground roadside units (RSUs) to enable efficient and reliable traffic applications and services. RSUs are able to monitor traffic conditions within the area of their coverage to provide real-time data and transmit to the central authorities of online vehicular applications. However, even though the next generation cellular networks will be characterized by high reliability and availability, sometimes it is not feasible to invest into a fixed expensive architecture. Examples of such situations include excessive traffic loads during public events, unexpected weather conditions, or temporary severe traffic congestion. In these cases, one potential solution is to deploy flying RSUs which are carried by unmanned aerial vehicles (UAVs) to serve as mobile network edges. The use of UAVs would enable dynamic support for vehicular environments. The key benefit of this dynamic capability is the potential to characterize the environmental requirements based on traffic safety events and congestion conditions. To cope with situations such as deployment in areas where prior knowledge is not available, UAVs can offer an online data collection service for investigating environmental requirements. In addition, they have the potential to change their positions according to traffic safety events and congestion conditions while in use.
In this work, we propose a traffic-aware approach to enable the deployment of UAVs in vehicular networks. Our approach consists of two major components. i.e. (i) a traffic modeling component and (ii) a dynamic deployment component. The traffic-modeling component aims to characterize traffic conditions by numerical estimation. These estimates are then utilized by the dynamic deployment component to relocate the UAVs according to the environmental traffic demand. To relocate UAVs, we employ a dynamic deployment algorithm based on bee swarm intelligence (BSI). The proposed approach aims to improve the quality of service (QoS) in vehicular networks. We evaluate the efficacy of our proposed approach in terms of data coverage, dissemination overhead, and communication delay. Simulation results show that our proposed method can achieve full network coverage under different traffic scenarios without extra communication overhead or delay.

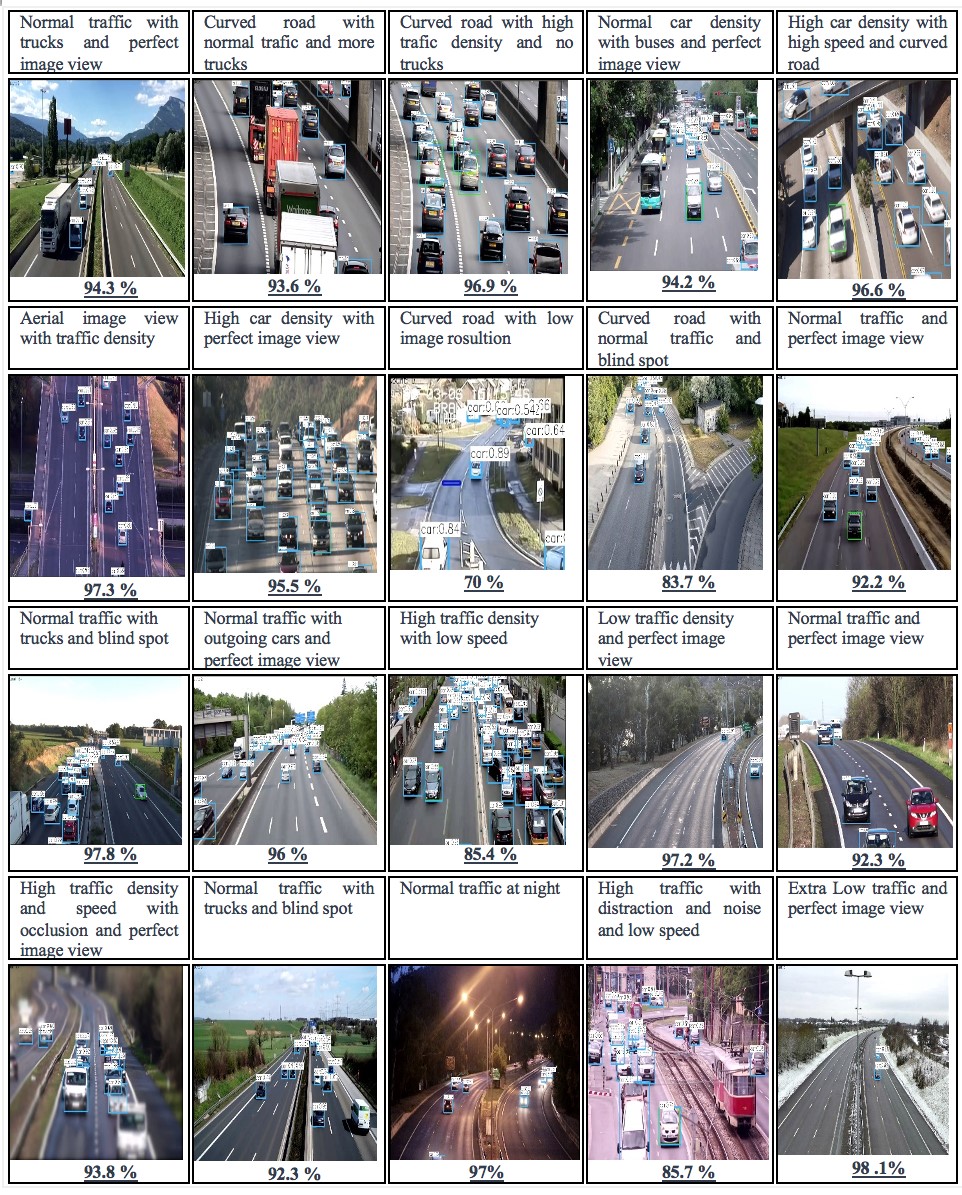
Moreover, we propose a lightweight infrastructure-less object tracking and counting system. The proposed system leverages efficient object detector and object tracker algorithms. It integrates deep learning (YOLO) for object detection, and Kernelised Correlation Filter (KCF) for object tracking. The proposed system utilizes a simple distance calculation, and KCF tracker to count objects once. The tracking is implemented in a narrow region instead of the whole frame to reduce errors and time complexity. The system has been tested against a dataset of 20 different videos. These videos varied in the view angle, speed of motion for the objects, density of objects and the image quality. The performance evaluation showed promising results in terms of accuracy and speed.
